
Chapter 4: Motion in 2-Dimensions
4.0. Overview
We've already looked at objects that are traveling horizontally, perhaps with a constant velocity or perhaps with some acceleration. We've also looked at objects that move in the vertical direction: rockets that accelerate upwards, or objects that are thrown straight up into the air, or dropped.
We've also learned how to manage vectors that have both x and y components. A focus in this chapter is looking at projectile motion, in which an object moves through the air, subject only to the force of gravity.
We're also going to look at two other aspects of 2-dimensional motion: objects that move in circles, and objects that are moving relative to each other.
Let's get started!
4.1. Projectile Motion
We’ve already discussed projectile motion briefly. Here's the general idea.
Objects thrown in the air are considered projectiles; objects thrown at some angle to the vertical follow a curved parabolic path called a trajectory.
We can easily solve all sorts of projectile problems if we make two assumptions:
- free-fall acceleration is constant throughout the trajectory
- air resistance is negligible
The reason these problems are easy to solve is because we can consider the horizontal and vertical motions independently. In fact, we’re forced to this by the nature of the problem: horizontally, there is no force that causes the velocity of the object to change, while vertically, the force of gravity causes the object to accelerate toward the earth.
4.1.1. Visual examples of parabolic motion
You'll have no trouble finding examples of parabolic, projectile motion on YouTube.
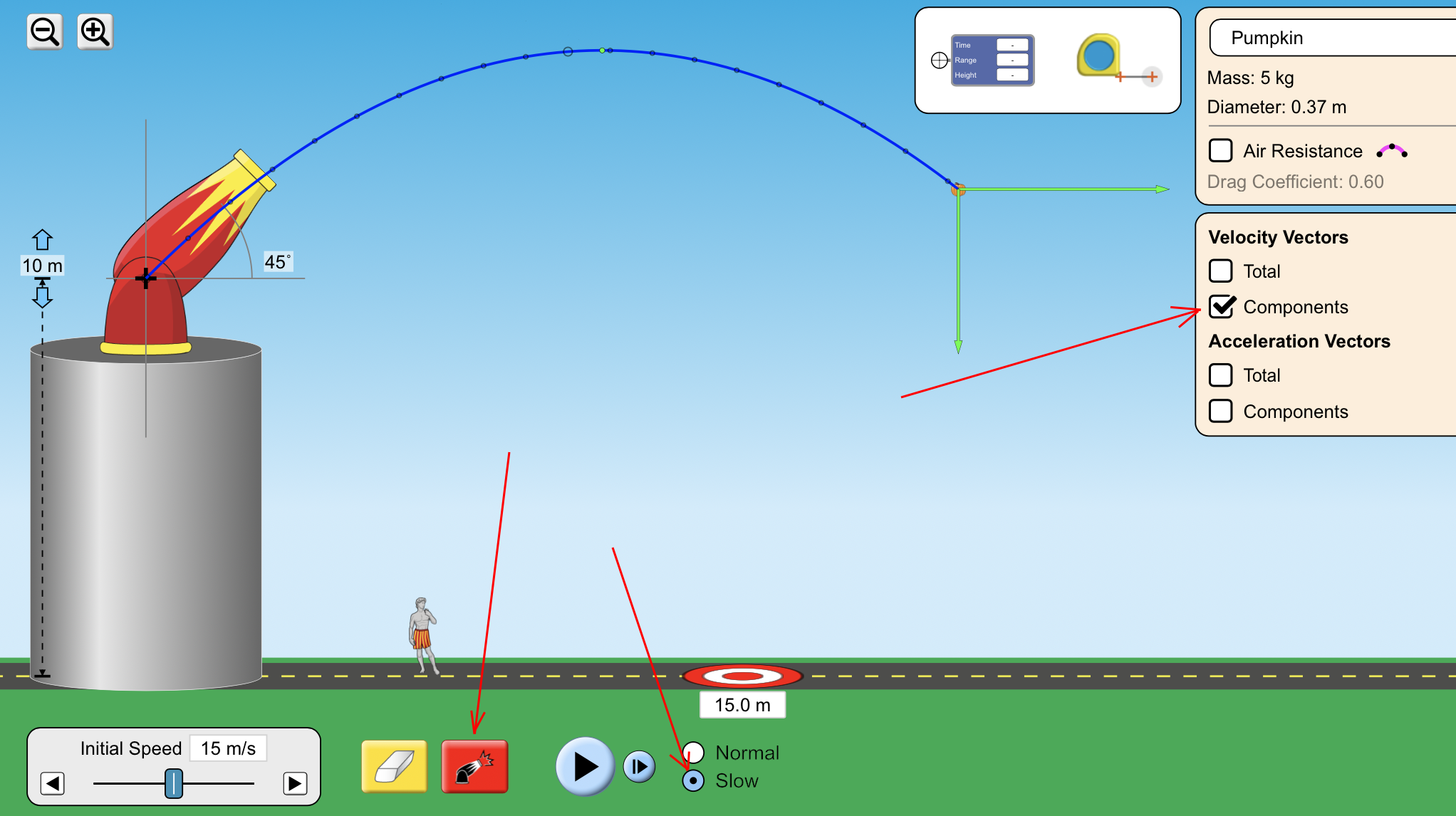
Here's an online model that will allow you to fire a projectile from various angles, with various initial velocities. Click on the image to go to the website, set the velocity vector to "components," set the frame rate to "slow", and then click on the red "fire" button to launch a projectile.
4.1.2. Projectile problem-solving strategies
There are two slightly different strategies that can be used to solve projectile problems.
- Break given vectors into x- and y-components, and then apply kinematics in x and y directions separately. If needed, resolve resultant components to identify a final velocity in polar notation (magnitude and direction).
(This is a common type of problem in physics.) - Use unit-vectors (i, j) with vector-based kinematic equations like

(less common)
Long Jumper
A long jumper leaves the ground with a velocity of 11.0 m/s at 20.0° above the horizontal.
- What is the maximum height he reaches?
- How far horizontally does he jump? Solve using components.
- Assuming you've already determined the time of travel, solve for horizontal distance using i,j notation.
Solution:
- Maximum height analysis
- Horizontal distance analysis
- Horizontal distance using i,j notation.
Look out below
A stone is thrown from the top of a building , with an initial velocity of 20.0 m/s at 30.0° above the horizontal. If the building is 45.0 m tall...
- How long is the stone in flight?
- What is the speed of the stone just before it hits the ground?
- Where does the stone strike the ground?
Solution:
- How long is the stone in flight?
- What is the speed of the stone just before it hits the ground?
- Where does the stone strike the ground?
A more abstract example
A particle starts from the origin at time t = 0, with initial velocity vx = -10 m/s and vy = +5.0 m/s. The particle is accelerating at 3.0 m/s2 in the +x direction.
- Find velocity components as a function of time.
- Express v as a function of time in (i, j) notation.
- Find speed at time t = 5.00s.
- Find position coordinates x and y as a function of time.
- Find position r relative to the origin as a function of time.
- Express displacement at time t = 5.0 s as a vector in i,j notation.
Solution:
- The problem has already nicely separated values into x and y coordinates for us, so we can identify components as a function of time using classic kinematics equations

- Now that we know the components, it's easy to express the velocity in i-j notation:

- To get the speed, we can use components to solve for velocity at that time, and then resolve those components into a net speed using Pythagorean theorem:

- To get position coordinates, we can again use our basic kinematics equations with the values given for this problem:

- Again, once we know the components, it's easy to come up with an i-j expression:

- We can find the displacement at time t = 5.0 s using the expression we developed in the previous problems.

4.2. Uniform Circular Motion
We’ve defined acceleration a to be a change in velocity over a period of time:
Because velocity is a vector with two aspects to its motion—magnitude and direction—, it makes sense that there are two ways that velocity can be changing:
- its speed might be changing (increasing or decreasing)
- its direction of motion might be changing
Note that an object whose speed is changing, even if it's traveling in a straight line, is still accelerating.
Likewise, an object whose direction of motion is changing is accelerating, even if it's traveling at a constant speed.
4.2.1. Direction of centripetal acceleration
Direction of centripetal acceleration
For an object moving along a circular path, there is an acceleration based on its changing direction that points toward the center of the circle. This acceleration is called centripetal ("center-seeking") acceleration, ac.
We can determine that direction by considering an object moving in a circle with constant speed.
4.2.2. Magnitude of centripetal acceleration
Calculating centripetal acceleration
The magnitude of the centripetal acceleration for an object moving in a circle at constant speed is:

Let's see how that equation is derived.
The Hammer Throw
The "hammer throw" is an event in track and field in which a mass at the end of a length of steel wire is spun in a circle and then released so that it travels the farthest distance possible.
For this hypothetical problem, assume, a 4.0 kg mass is swung in a horizontal circle of 1.6 m radius, at 1.5 revolutions per second. What is the centripetal acceleration of the mass (magnitude and direction)?
Solution:
To calculate the centripetal acceleration we need to know how fast the hammer is moving, preferably in the units m/s. Let's convert that "1.5 revolutions per second" and "1.6 m radius" into a speed that we can use.

4.2.3. Tangential and radial acceleration
So far we have only considered the acceleration due to a changing direction of an object's motion, the "centripetal" acceleration that acts along the radius of the circle. For this reason we often refer to the centripetal acceleration as the radial acceleration calculated as .
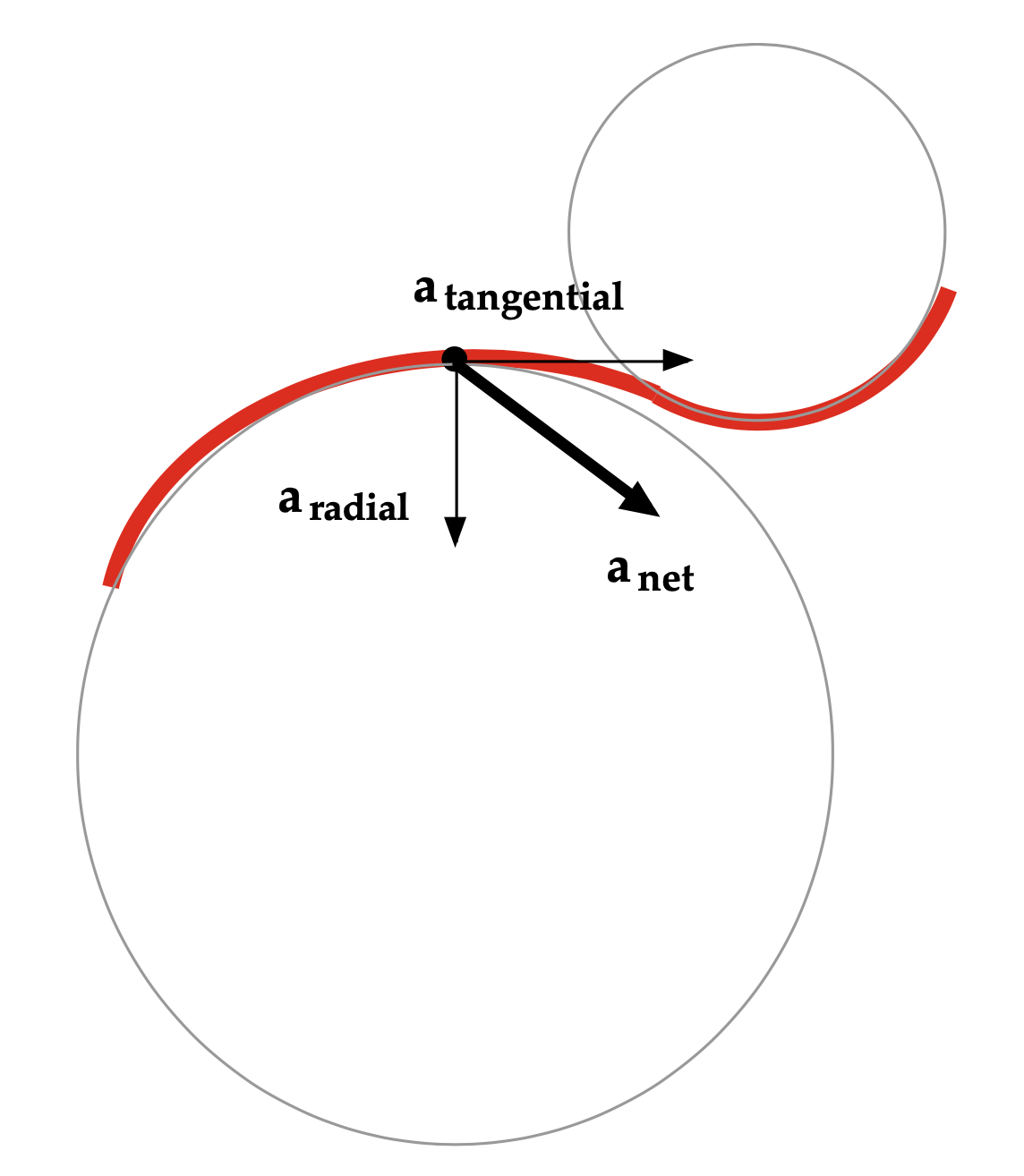
If the moving object is also changing its speed, it has an acceleration that acts along the tangent to the curved path. This aspect of its acceleration is called the tangential acceleration, and is calculated as  .
.
In the diagram here, a particle traveling along a curved path (in red), speeding up at the position indicated. The net acceleration is the vector sum of the tangential acceleration and the radial (centripetal) acceleration.
4.2.4. Unit vectors for circular motion
We've seen how it can be useful to describe a particle's motion as it moves through an x-y world in terms of unit vectors î and ĵ, which correspond to the axes of the x-y system.
In a rotational analysis, where measurements are being made relative to the radius and the tangent of a circle, it's similarly convenient to be able to write the accelerations of a particle moving in a circular path in terms of two new unit vectors:
 is a unit vector tangent to the circular path, with a positive value indicating a counterclockwise direction.
is a unit vector tangent to the circular path, with a positive value indicating a counterclockwise direction. is a unit vector along the radius vector, with positive directed radially outward.
is a unit vector along the radius vector, with positive directed radially outward.
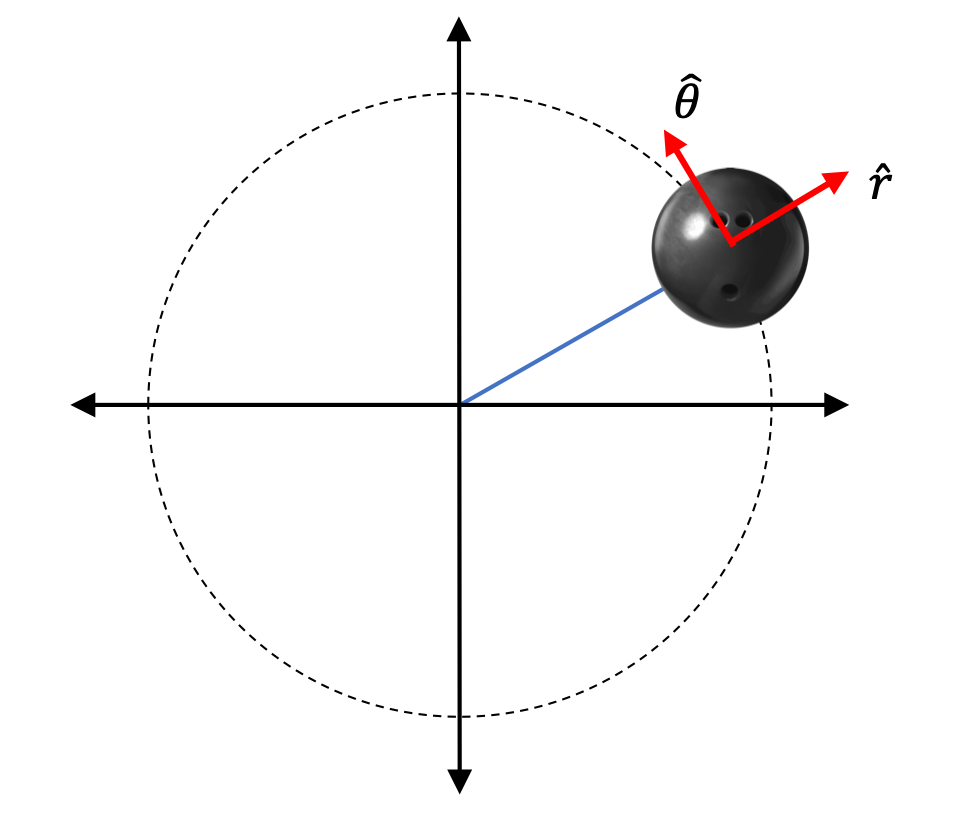
Consider the bowling ball shown here, with a centripetal acceleration of 4.0 m/s2 , and traveling in a counterclockwise direction but slowing down at 2.0 m/s2. What would the net acceleration be at that point, expressed as unit vectors?
Because the radial unit vector is defined as pointing away from the center of the circle, and the centripetal acceleration is 4.0 m/s2 towards the center of the circle, the centripetal acceleration has to be given as a negative value.
And because the tangential unit vector is positive in the counterclockwise direction, but the ball is slowing down as it moves in that direction, the tangential acceleration must be negative there, too.
So, we would write the net acceleration for the rotating bowling ball as 
The Bowling Ball Pendulum
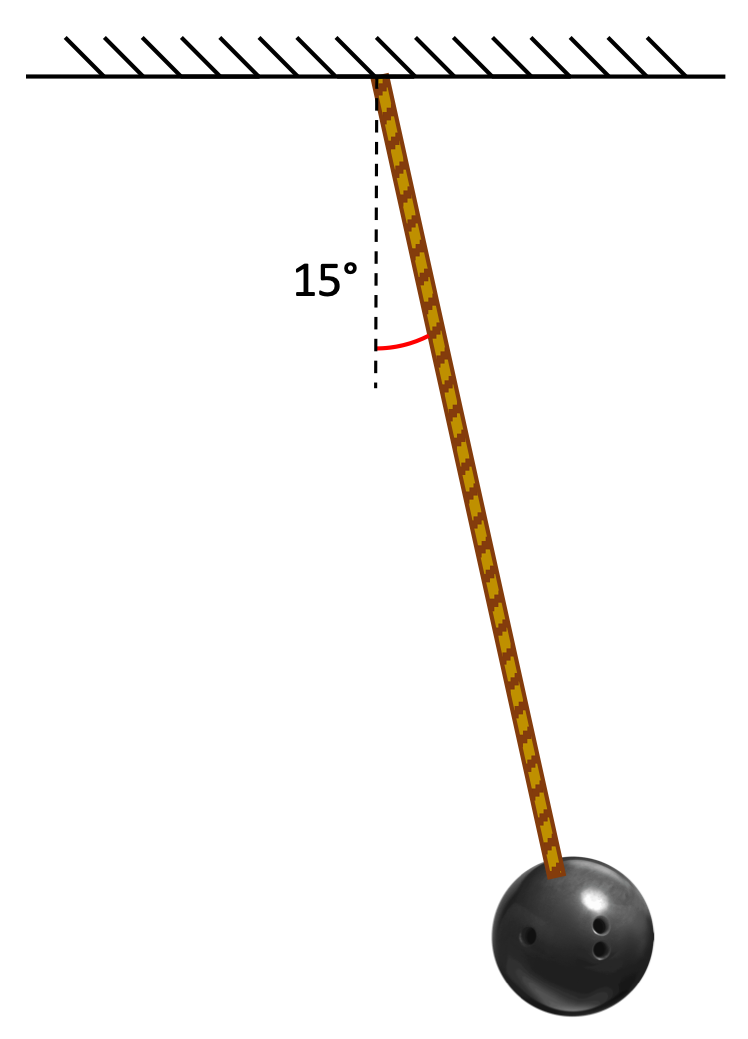
A bowling ball pendulum is tied to the end of a string 3.00 m in length, and allowed to swing in a vertical arc under the influence of gravity. When the hanging ball is swinging up (counterclockwise in the image shown), it makes an angle of 15.0° with the vertical and has a speed of 2.00 m/s.
- Find the radial acceleration at this instant.
- When the ball is at an angle θ relative to vertical it has a tangential acceleration of
 . Find the net acceleration of the ball at θ = 15.0° (using same data as above) and express it in
. Find the net acceleration of the ball at θ = 15.0° (using same data as above) and express it in  form.
form.
Solution:
- The radial acceleration acts along the radius. This is the "centripetal acceleration," calculated as:

- Using the calculation given above, we can calculate the tangential acceleration as:

Expressing that in unit-vector form, then:

4.3. Relative Motion
Observers with different viewpoints ("frames of reference") may measure different displacements, velocities, and accelerations for any given particle, particularly if the two observers are moving relative to each other.
What does that mean?
4.3.1. Relative Motion in 1-D
One dimensional relative motion (at non-relativistic speeds), makes sense. If a student throws a water balloon at 5 m/s (in the positive-x direction) and it hits a stop sign, the balloon is traveling at 5 m/s relative to the stop sign when it hits it. If the student is in a car traveling at +10 m/s when they throw the balloon at 5 m/s, the velocities add together, and the balloon hits the stop sign traveling at 15 m/s.
We can state this formally:

What happens if the water balloon is thrown in the opposite direction of the car's motion? How would that change the analysis?
What would happen if the water balloon was thrown at the exact same speed as the car, but in the opposite direction?
Mythbusters
This classic film from 1960 does a nice job of presenting these ideas in a really interesting format. Watch this video up to the 3:14 mark.
Frames of Reference (1960)
4.3.2. Relative Motion in 2-D
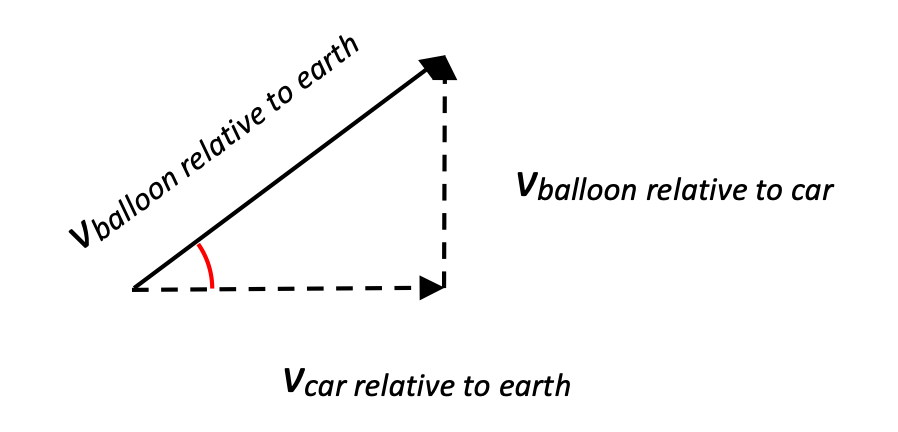
The idea of relative motion can occur in more than one dimension, of course. What if the student, traveling in a car that is moving at +10î m/s (in the positive-x direction), throws the balloon out the window at +5ĵ m/s (in the positive-y direction)? We can't just add the two velocities together as magnitudes because they aren't in the same direction.

We need to add the vectors together.
Adding relative motion vectors together in 2-D
To solve relative motion problems in 2-D, begin by identifying what motions are occurring relative to what frame of reference.

Draw a sketch of the situation so that the effects of the two vectors can be appropriately placed.
Now create equations (one for each dimension) so that the motions can be analyzed. Note that this is simple problem, so you could easily get away with doing a simple right-triangle analysis using Pythagorean and trig analyses. For more complex problems, however, you'll want to follow the "calculate separate dimensions using components" strategy shown here.

Finally, combine the x and y equations to identify the resulting motion.

Solving a problem in two-dimensions by separating vectors into components shouldn't be a big challenge here. It can be tricky coming up with a diagram with the vectors appropriately arranged, so pay careful attention to your sketches for these problems to make sure they make sense.
Easy: Boat crossing a lake
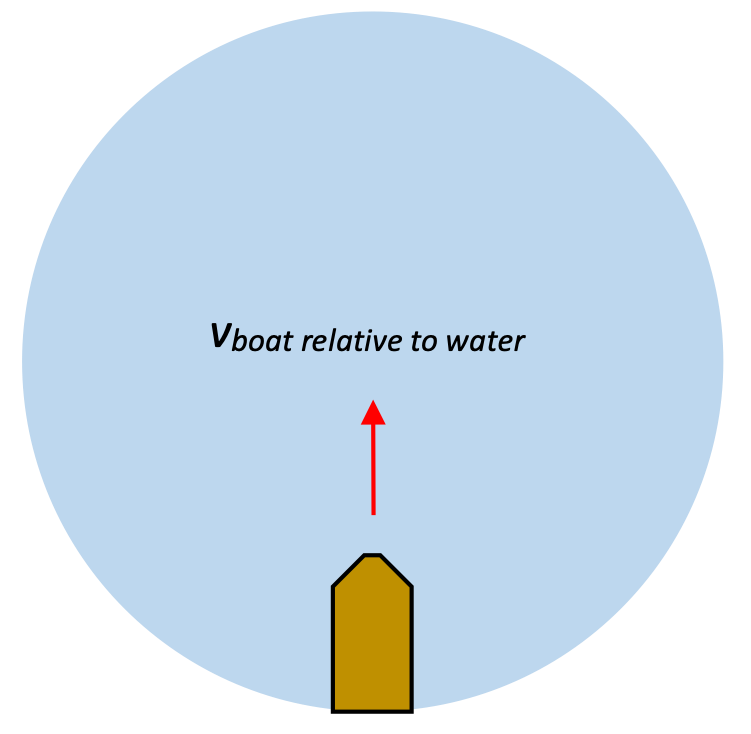
A small motorboat travels at 4.0 m/s through still water. How much time will it take to travel across the 120 meter diameter lake?
Solution:
This is a straightforward (no pun intended) "displacement-velocity-time" problem:

Easy: Boat crossing a river
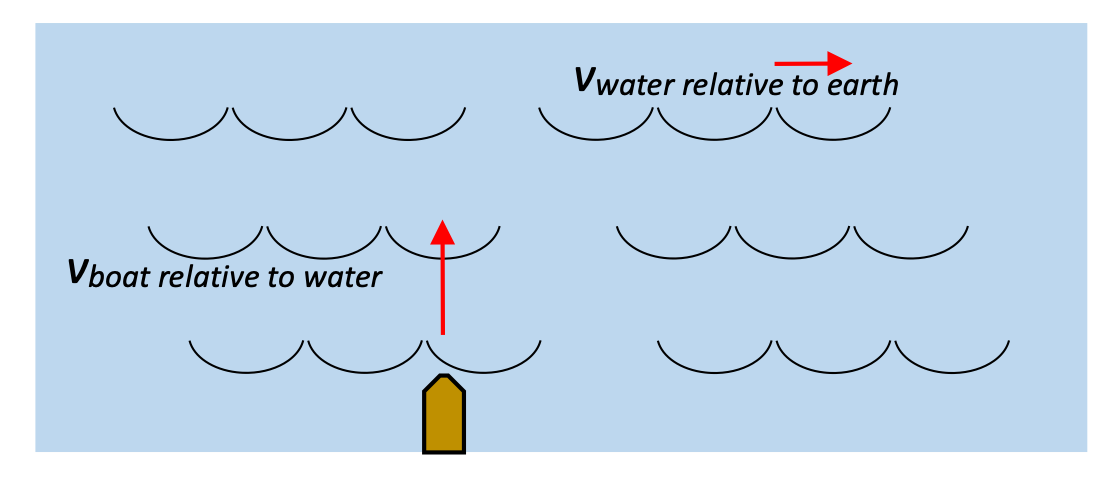
The same motorboat traveling at 4.0 m/s aims directly across a 120 meter wide river. The river itself is flowing at 2.0 m/s to the right.
- What is the net velocity of the boat relative to somebody standing on the shore?
- How much time will it take to travel across the 120 meter wide river?
- How far downstream will the boat end up from where it would have landed if the river wasn't running?
Solution:
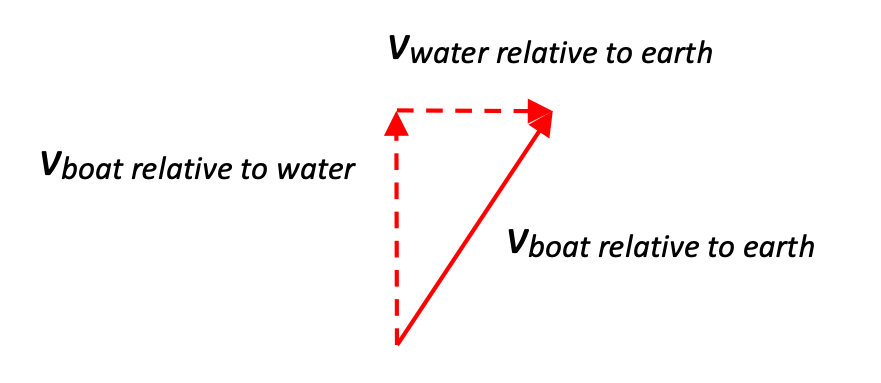
- The boat is still traveling at 4.0 m/s north relative to the water, but the water itself is now traveling at 2.0 m/s to the right (east). Someone standing on the shore, at the boat's original position, say, will see the boat traveling away from them at 4.0 m/s, but also downstream from them at 2.0 m/s. The net velocity is the vector sum of those two motions.
A formal analysis can be done as above to calculate the net velocity, or in this case, because the motions are at right angles to each other, we can do a quick triangular analysis to identify the solution:

- Even if the boat's net velocity is 4.5 m/s relative to the person standing on the shore, the boat's cross-stream velocity is still only 4.0 m/s. It needs to cross 120 meters of river, and it's traveling at 4.0 m/s in that direction, so it again takes 30 seconds to cross, the same as it did when it was crossing the stillwater lake.
- As the boat is crossing the stream is carrying it down at 2.0 m/s. The boat traveled with this "sideways" velocity for the 30 seconds that it took to cross, so we can easily calculate how far its displacement downstream was during that times:

4.3.3. Relative Motion in 2-D
For relative motion problems, it's critical to label the vectors very clearly, in such a way that we can describe an object's velocity relative to a certain reference frame. In some problems the resultant velocity will be given in the problem, and you'll be trying to solve for a different vector.
Drawing a relative velocity vector diagram
Your vector diagram should be drawn so that the sum of two vectors add together ("tip-to-tail") to create a resultant vector.
It helps to identify the vector addition by notating the vectors as "the vector of a relative to b." When you do this correctly, you'll find that:

In the case of our boat problem above:

Let's see how we can apply that in our next problems.
Easy: Boat turning upstream
A boat can travel with a velocity of 4.0 m/s in still water.
- If the boat needs to travel directly North across a river with a current flowing at 3.0 m/s to the east, at what upstream angle should the boat head?
- If the river is 120 m across, how long will it take the boat to get to the other side?
Solution:
Moderate: Plane in wind
In order to arrive at its destination on time, a plane needs to fly at 300 km/h, 135°, but a 50 km/h wind blows from the north. What velocity should the plane fly at (magnitude & direction) to achieve its desired velocity?
Solution:
Challenge: Cars moving relative to each other
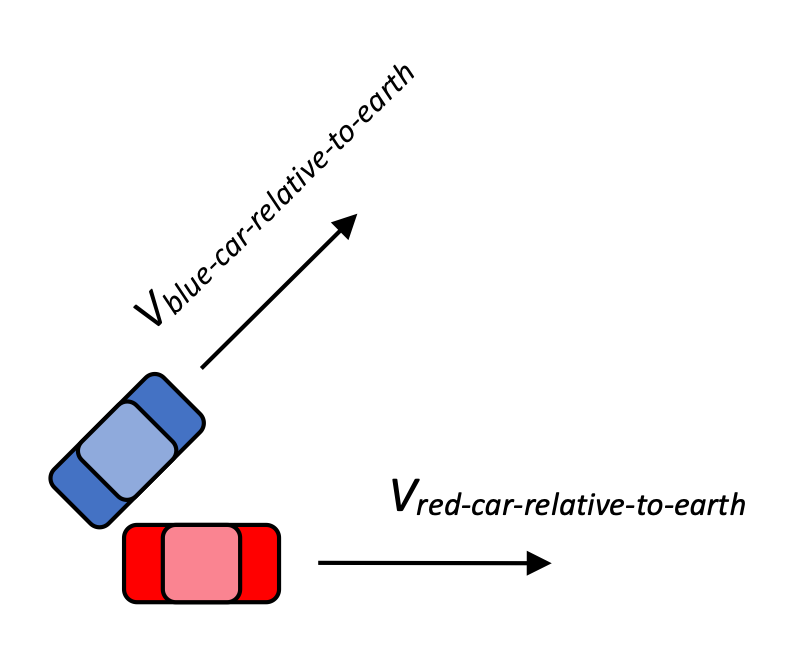
A red toy car heads east with a constant speed of 0.30 m/s while a blue toy car heads northeast (at 45°), also with a constant speed of 0.30 m/s.
- Draw a vector diagram that shows the velocity of the red car relative to the blue car.
- Use vector component analysis to calculate the velocity of the red car relative to the blue car (magnitude and direction).
Solution:
One way of trying to understand this problem is to imagine that you are on the blue car, looking at the red car as both cars drive. What is the motion of the red car, relative to you in the blue car, as both cars begin moving?
As the blue car moves up and to the right, the red car is going to be moving away from you, and to the right.
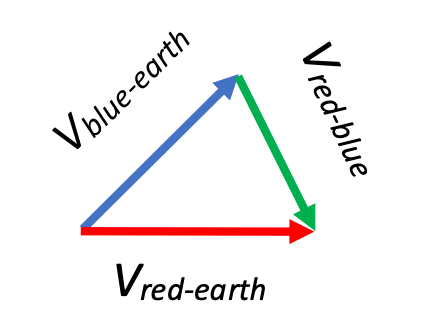
The three vectors that you want to identify in a diagram are the ones that are given in the problem, and the one that you're trying to find:

By inspecting the vectors in the diagram to the right, it appears as if the vector equation that would represent this situation would be:

The two vectors being summed there are the vectors that are placed tip-to-tale in our diagram.
Now all we need to do is perform the vector addition, using components identified via trigonometry.

Resolve these two components into a single vector in polar notation:
